3D Printed Mechanical Digital Clock

This post is about building a 3D printed, mechanical digital clock, made out of seven-segment displays.
This post is about building a 3D printed, mechanical digital clock, made out of seven-segment displays.

I've always been a fan of the Lego Technic series, especially those models that have gears and cranks and moving parts. But it seems that Lego is shifting the focus of the Technic series away from functional models, so I had to take matters into my own hands. I think an orrery is the perfect project to build out of Lego Technic parts as it makes for a cool display set and is functional at the same time.
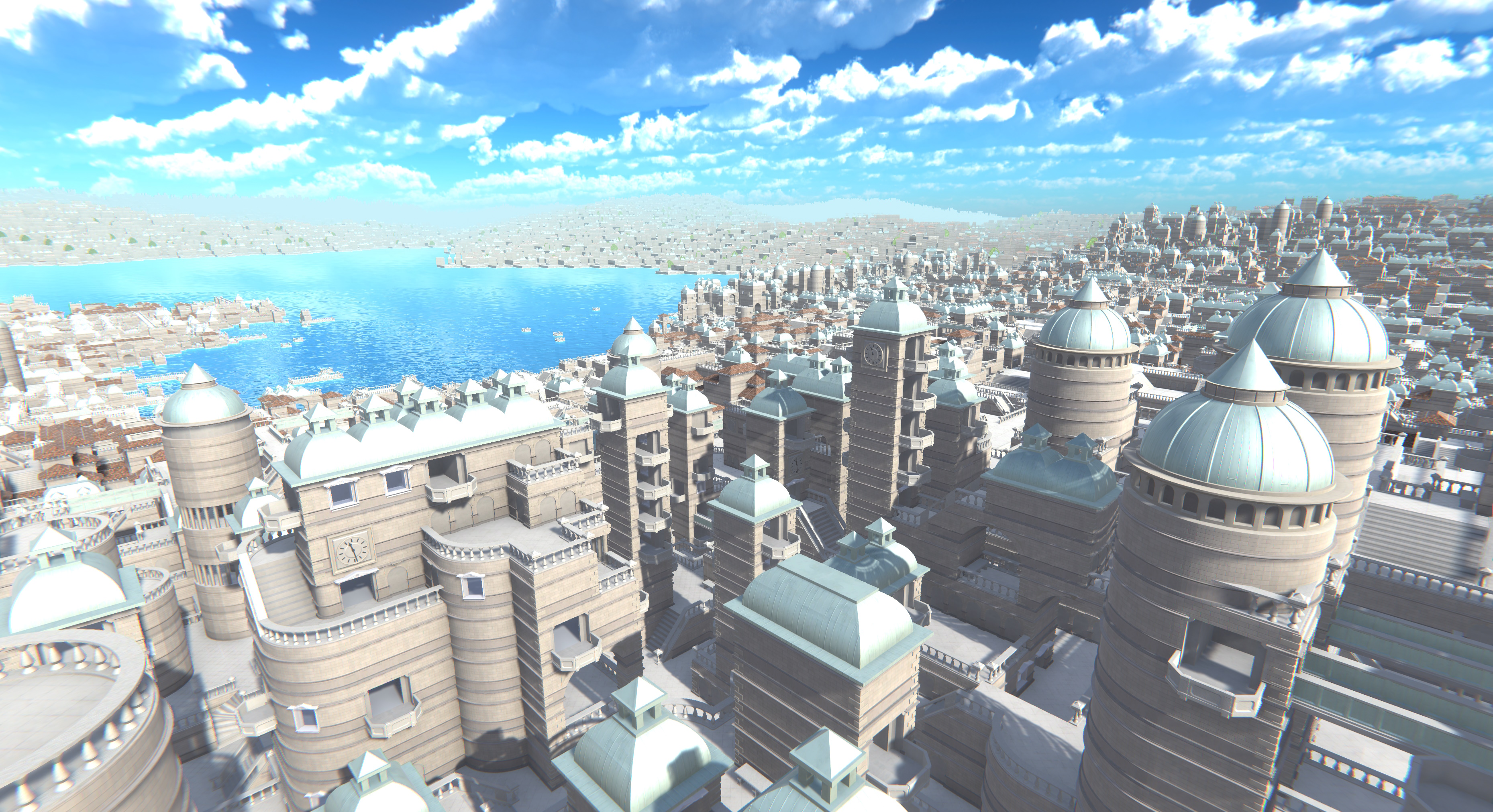
This article describes how I generate an infinite city using the Wave Function Collapse algorithm in a way that is fast, deterministic, parallelizable and reliable. It's a follow-up to my 2019 article on adapting the WFC algorithm to generate an infinite world. The new approach presented in this article removes the limitations of my original implementation.
This article provides an overview of the paper "Adversarial Generation of Continuous Implicit Shape Representations", which I co-authored with Matthias Fey. While the paper focuses on the theoretical aspects, I'll provide a higher level explanation and and some visualizations here on the blog.

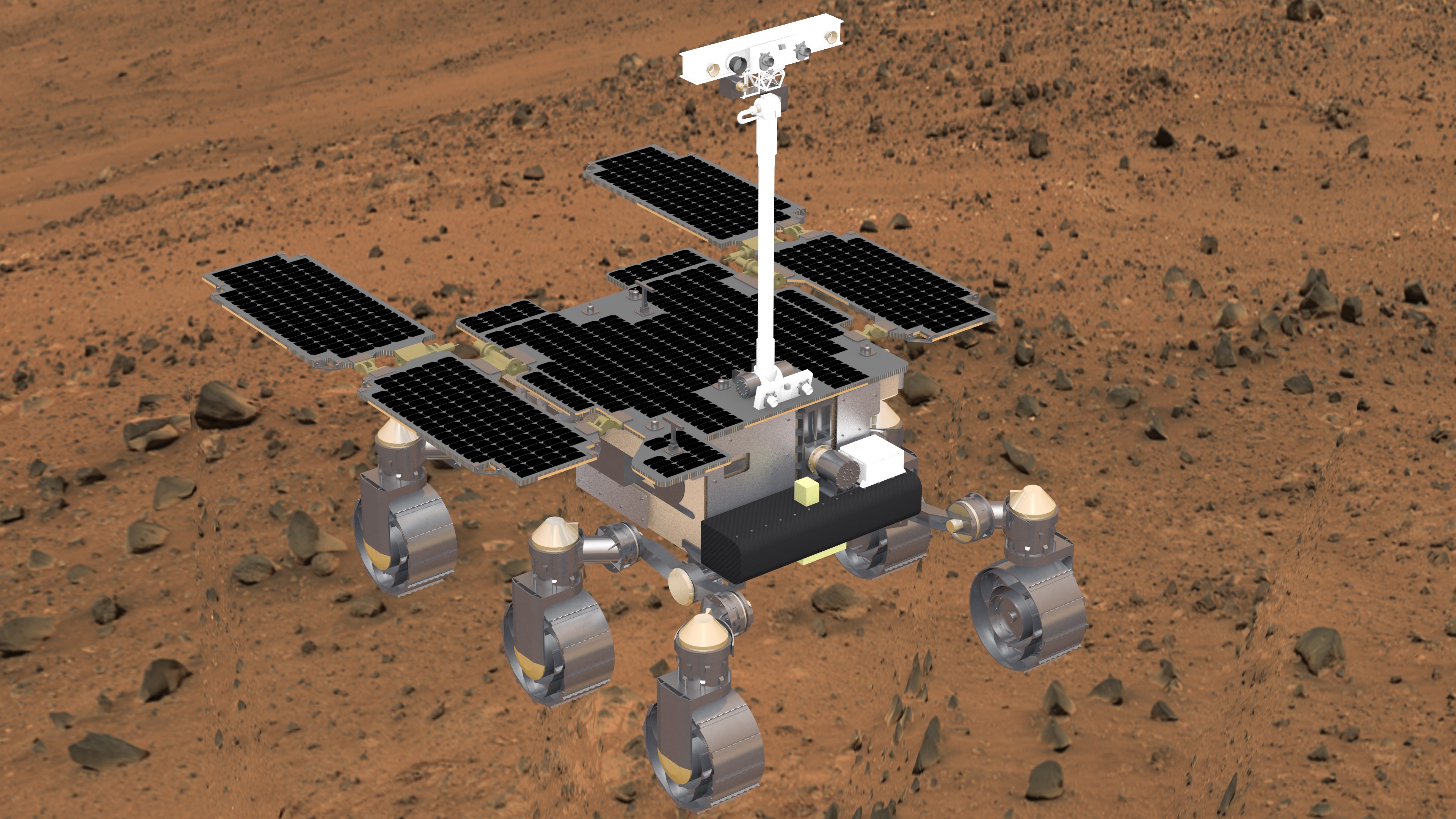
I was part of a university project group that develops autonomous model race cars. We are a group of twelve students working on the project in part time for year.

Click here for the interactive visualization.
The Natural History Museum in London has a data portal in which they provide digital records for many of their specimens. Some of these records have images. I recently learned how to use machine learning tools such as convolutional neural networks and I wanted to use the NHM data to see what can be done with these tools. The dataset of butterflies seemed particularly interesting to me because the images are visually interesting, yet they are all similar in that they all contain a butterfly in a canonical pose.
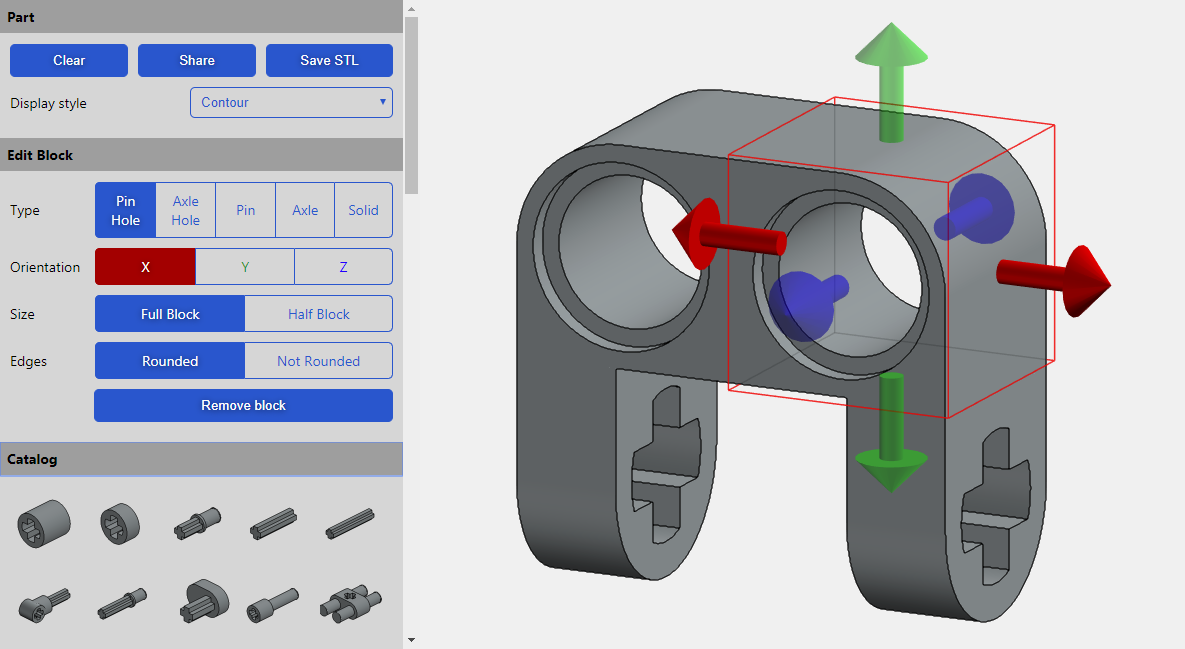
I made a web app that lets you design your own Lego Technic parts and save them as printable STL files. You can check it out here.

Like in the previous year, I took part in the Global Game Jam. I joined a team of six programmers, unfortunately there was a shortage of artists this year. During the 48 hour jam, we made a space game that is inspired by Faster Than Light.
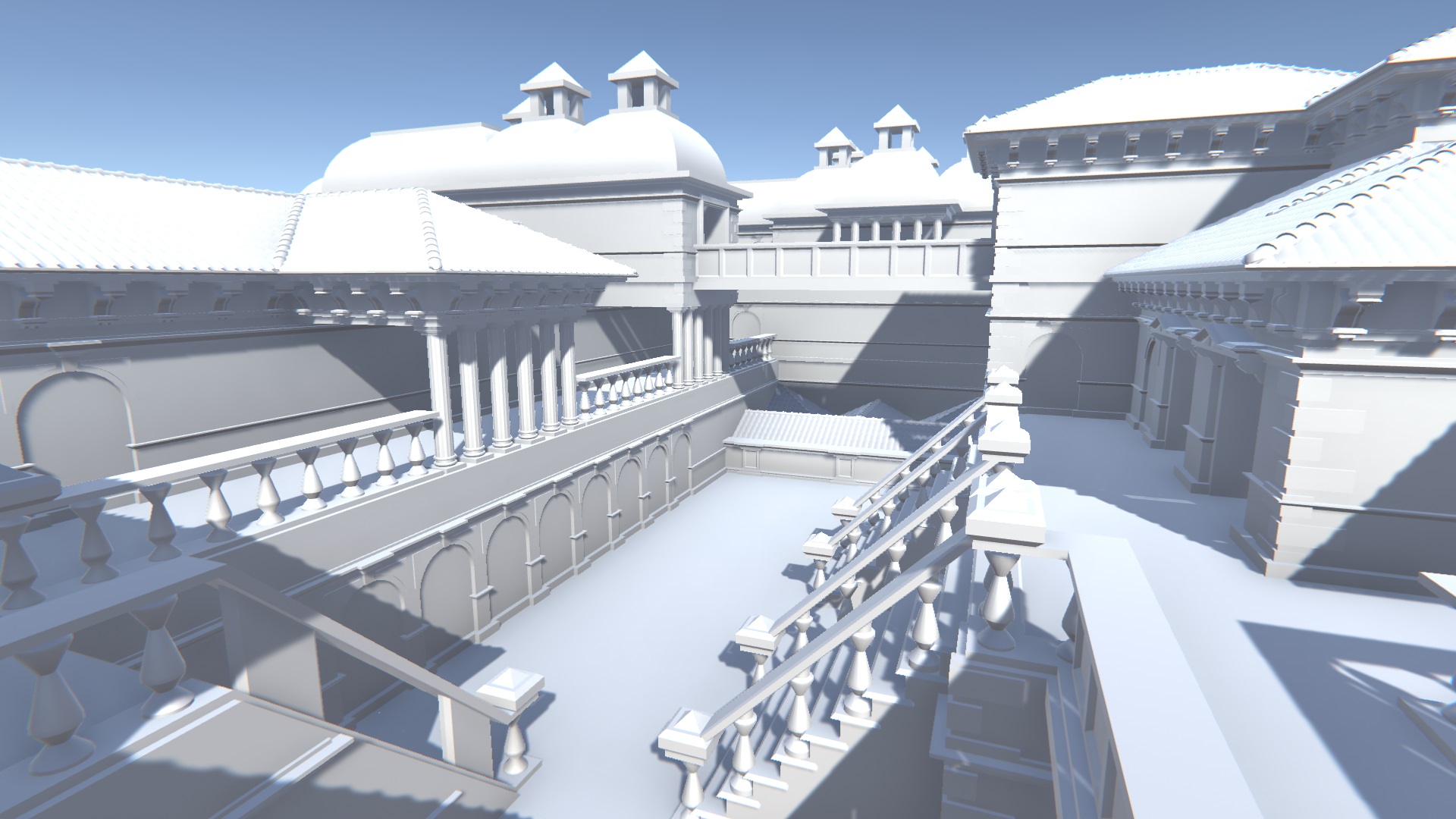
This is a game where you walk through an infinite city that is procedurally generated as you walk. It is generated from a set of blocks with the Wave Function Collapse algorithm.
This is one of my first 3D modeling projects in Blender and my biggest 3D modeling project so far.